大学经历
实验室生活 电子学会~未来太远 只争朝夕
大一下学期的时候,我第一次走进实验室, 走进我梦想启航的地方。看到各种仪器设备,看到丰富多彩的作品, 看到那些大神级别的学长,心想着,如果能像他们一样,必不负大学时光。 我开始照着学长的指导学习51单片机。对于一个只会电脑开关机的山里人,从零开始,还是有很多的困难的。 但是我知道成功的背后都是有理由的,没有什么事情是那么简单。 依然忘不了我们三个菜鸟为了自己的第一个作品在大冷天包宿干活, 现在想想真是其乐无穷,在今后的三年里我在这里学习到很多东西,我的大学也因为实验室变得特别充实。
回忆






恩智浦飞思卡尔智能车大赛(电磁组)校级二等奖 [2016.07 – 2017.05]
在第十二届“恩智浦杯”智能车大赛中,我参加了电磁组,主要负责单片底层代码,中层代码,整体算法的编程和智能车机械结构的调整。 这一届的智能车比赛可以说是我大学中最浓墨重彩的一笔,消耗时间最长的比赛,当然也是收获最多的比赛。比赛的竞争十分激烈,在这个过程中,车子出现问题,然后再找出问题,有时候一些奇葩的错误总有种让人崩溃的感觉;没日没夜的调试,不断验证新方案,和论坛好友共同探讨。最大的收获还是加深了对位置式PID和增量式PID的理解和在实际应用上的调节方法。虽然身体十分劳累,但是乐在其中,最重要的是自己在不断学西新的东西,同时获得了珍贵的友情,真的是车友遍天下。 在东北赛区赛上,我们以预赛第4名晋级决赛,可惜的是在决赛的赛场上,决策失误,以2.4m/s的速度稳稳的跑完了全程,第一次试跑结束就全结束了,我们应该先用高档的速度冲一次,再去稳定成绩。最终东北赛区第七名,无缘全国总决赛。虽然有遗憾,但是这光辉岁月永远不会忘记!
能力标签
* 单片机程序开发
* PID参数调试
* 机械结构调试
* 接口界面调试
回忆





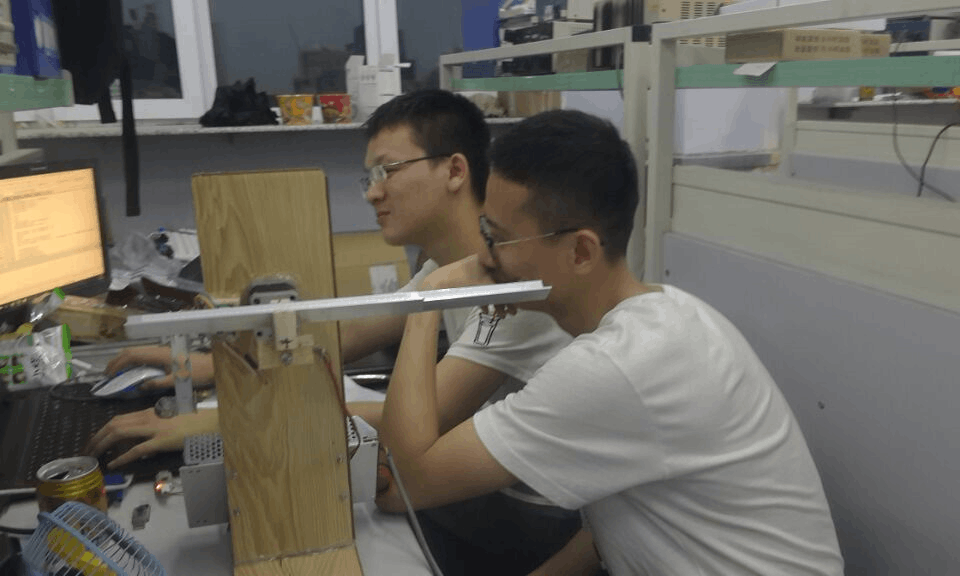
全国大学生电子设计大赛控制题(平衡杆) 校级一等奖 [2017.6]
我们组选择的题目是“平衡杆”。三天四夜的电子设计大赛让我学到了很多东西。由于题目限制我们使用的传感器只能是应变片,我们队伍采用HX711模块(24位AD)来采集应变片的受力程度与电压关系,通过MATLAB拟合转换成角度,由于HX711采集速度的限制我们无法闭环也很难加上滤波算法最后采用大范围计算转角输出给步进电机,然后加上逐次比较的方式来完成题目要求
能力标签
* 单片机程序开发
* 机械结构调试
* 电路调试
回忆
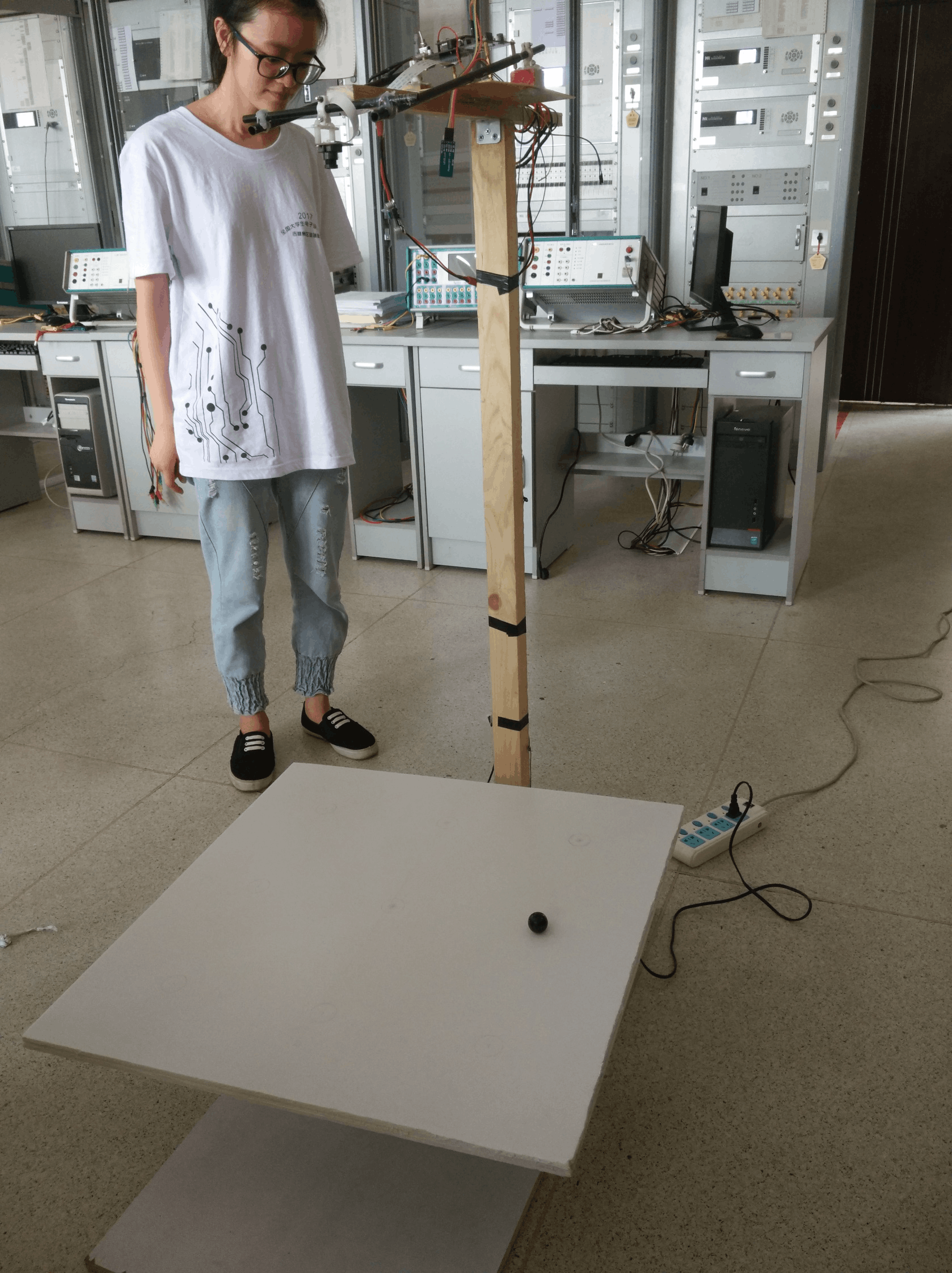
全国大学生电子设计大赛控制题(滚球控制系统) 省级三等奖 [2017.8]
我们组选择的题目是“平衡板”, 这个可以说是很让我难忘的一个过程了, 经历了三天四夜的鏖战, 最终只拿到了省三, 其实也算幸运吧, 比赛那天舵机还正好烧毁了, 但是遇到的老师比较好所以最终我们凭借结构和算法理论拿下了省三, 我们使用的是MKL26单片机+野火OV7725摄像头+双舵机+PID控制来实现一个小球在板子上面平衡和运动到不同的位置, 中途更换方案,临近交作品的时候还烧了大底板, 最后舵机也坏了总之就是很让人绝望, 但是这个过程中我看到队友仍在努力没有放弃,那我又有什么理由放弃呢,最后还是坚持了下来。感谢有你们让我变得坚定。
能力标签
* 单片机程序开发
* 机械结构调试
* 电路调试
回忆


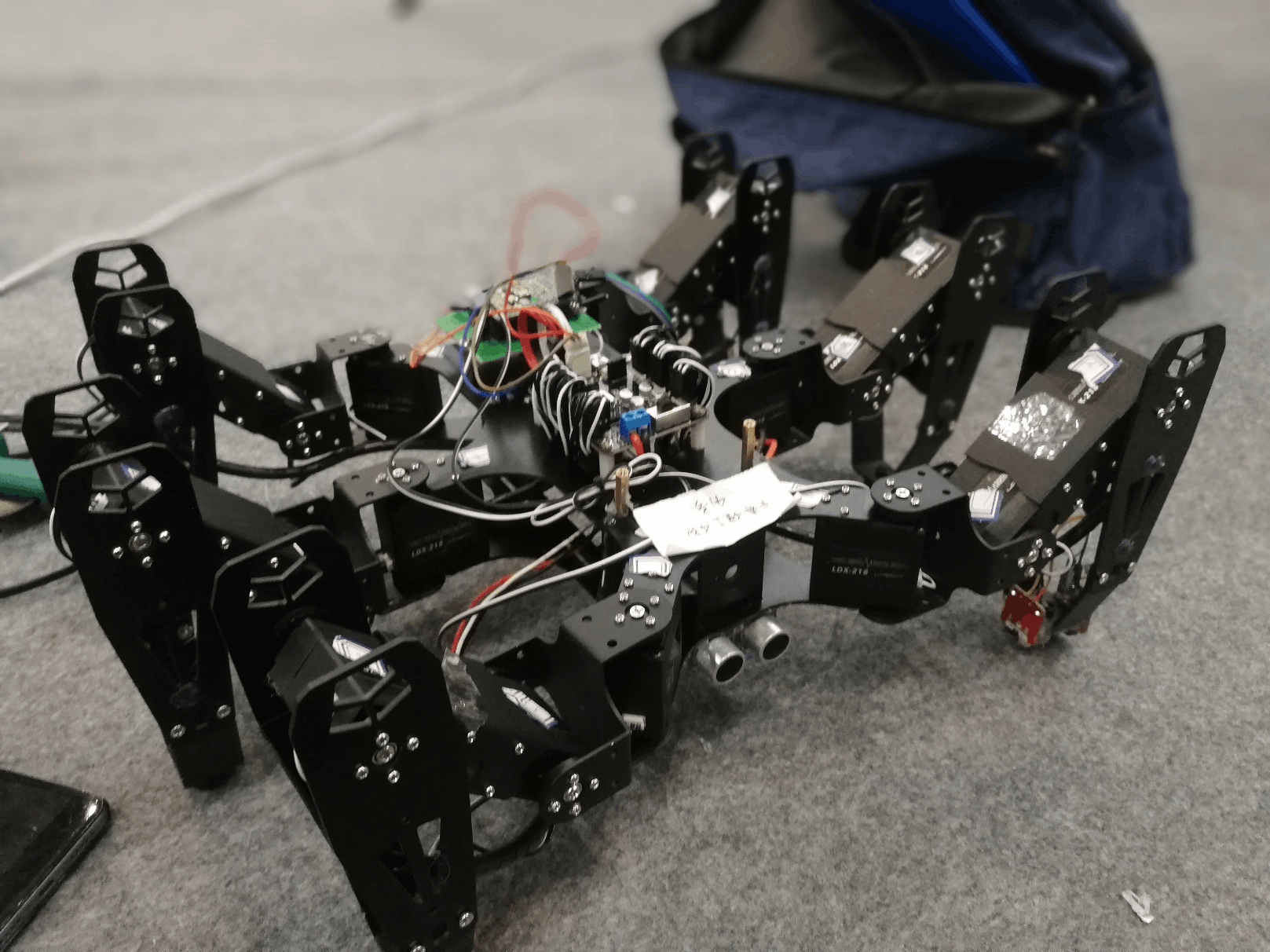
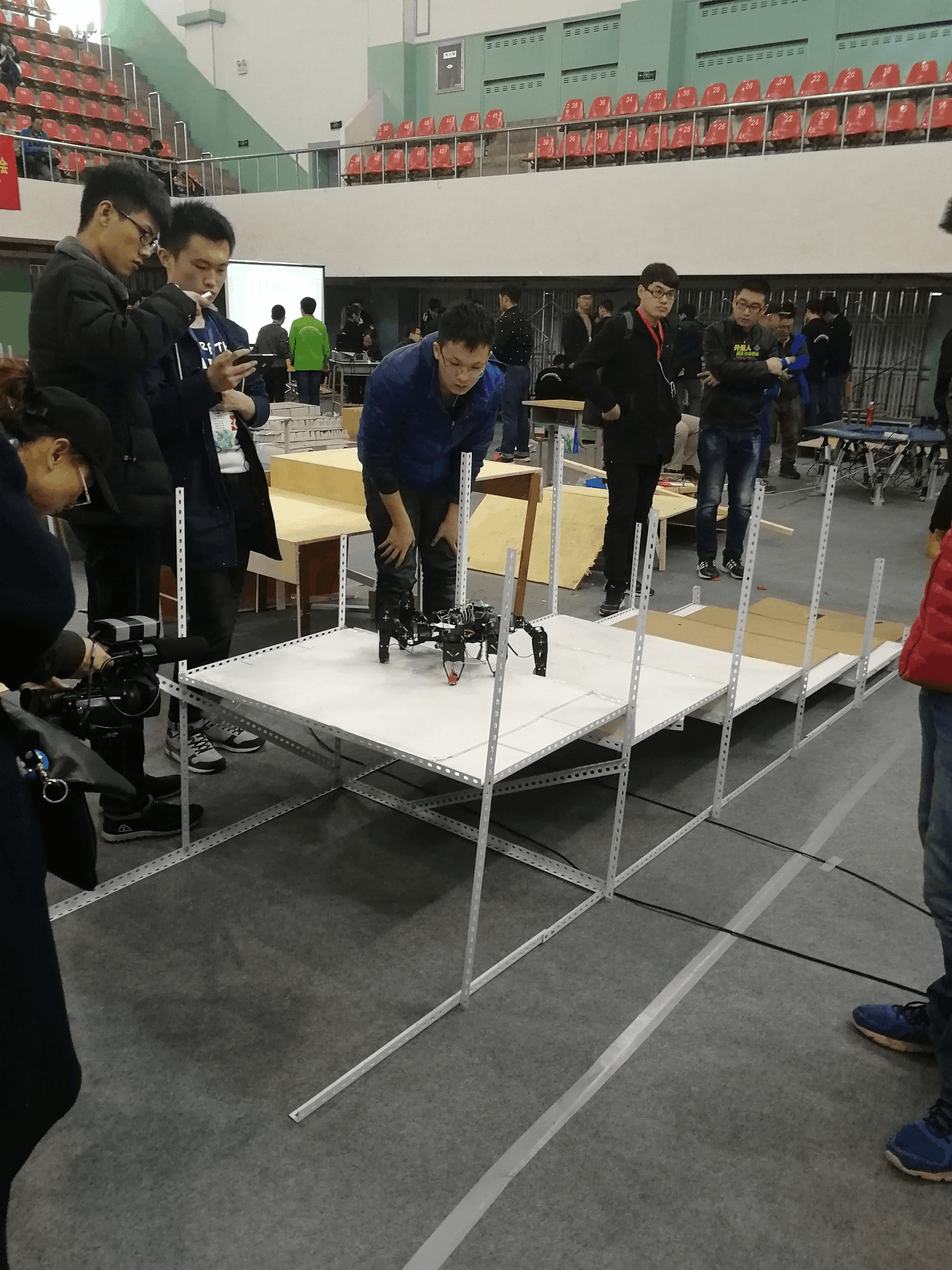
吉林省大学生机器人大赛(六足机器人爬楼梯) 省级二等奖 [2017.11]
不知不觉已经是个大三的学长了, 开始了第一次带队参加比赛-六足机器人爬楼梯, 这个过程还是很有收获的, 虽然一开始将这个爬楼想的复杂了以为是楼梯现场提供且高度不定, 所以采用了碰撞开关,KS103超声波,STM32F103, 六足运动规律来完成爬楼梯的,这个是完全可以自适应的, 但是由于碰撞开关的不稳定和得知了比赛楼梯为自己带去的楼梯, 故也采用了没有反馈的控制即舍弃了碰撞开关来实现爬楼梯, 最终只能上去五阶楼梯楼梯下来一阶楼梯, 其实也是后来自己调整程序的时候有点蒙了, 所以导致下楼的时候有个关节的算法出了问题, 不然这个过程其实就是超声波定位,执行上楼动作,下楼的动作的五次循环。
能力标签
* 单片机程序开发
* 机械结构调试
* 控制算法

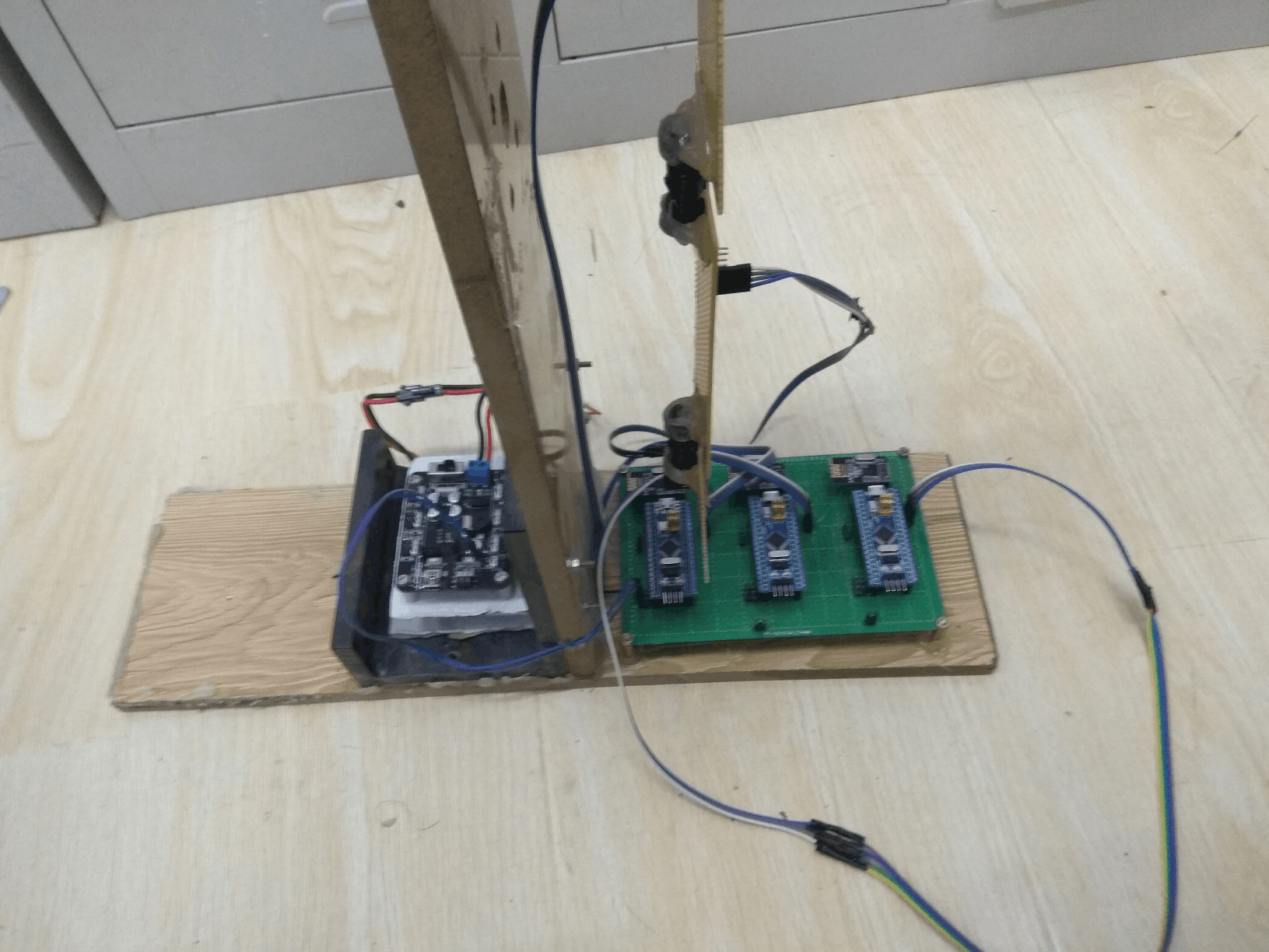
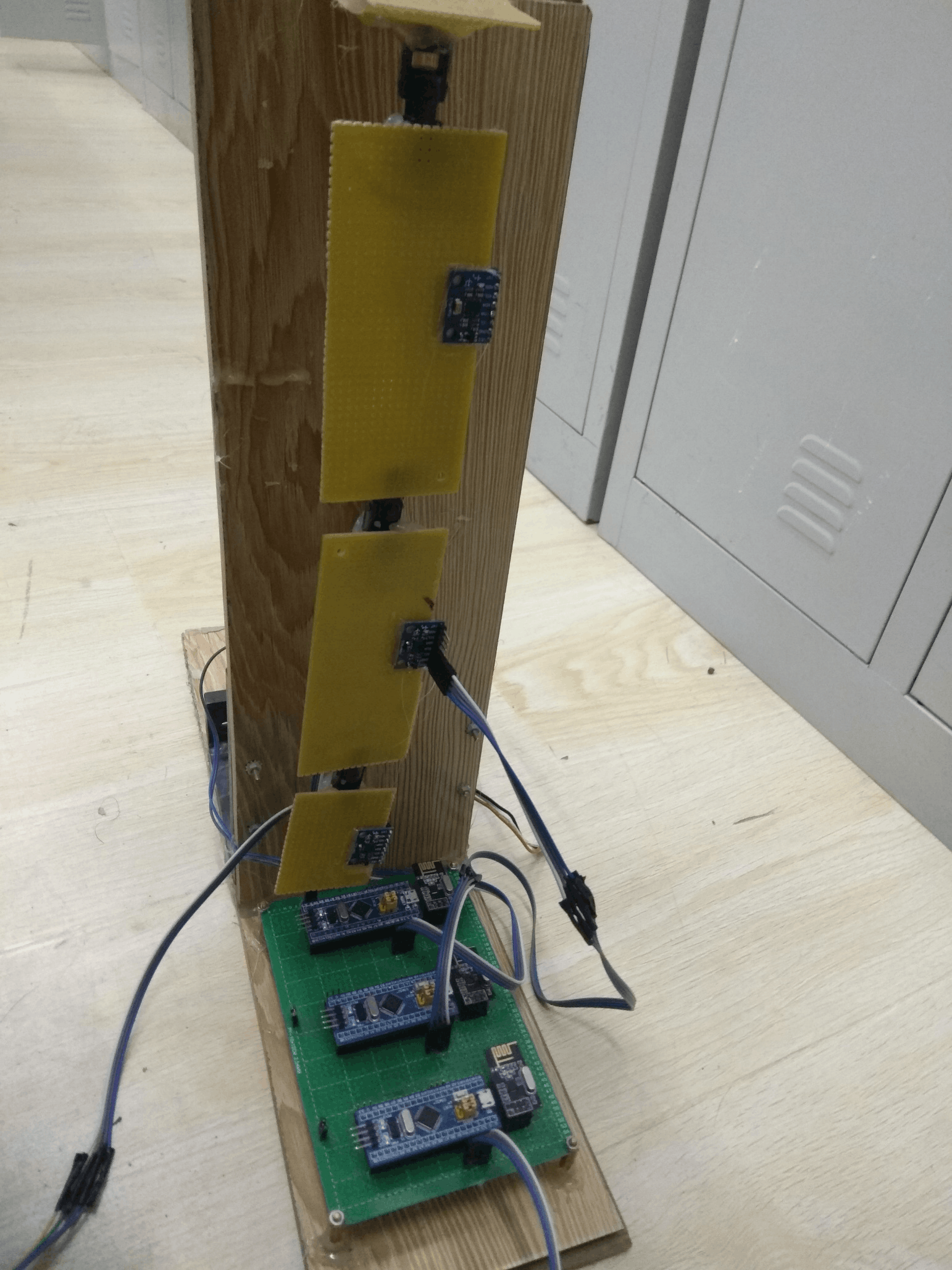
大学生创新创业项目 基于前臂运动检测的控制系统 省级 [2017.7-2018.7]
我们组的大创项目是基于前臂运动检测的控制系统, 我主要负责电路设计和软件控制。 这个过程确实很不容易, 不过幸运的是我们这个项目中关键的地方有比较成熟的库来供我们使用, 该项目主要是通过mpu6050采集角速度和加速度通过单片机STM32F103C8T6中的DMP库完成角度输出, 其实这个过程还是很艰辛的, 本来一开始想用双核就可以完成可最后却很难实现角度输出的准确性, 最终才采用上述方案,输出角度,单片机同时控制NRF24L01发送数据, 以达到无线通信的要求, 将这几个部分打包成一个模块, 采集人体前臂需要三个该模块, 然后就是NRF24L01通讯的问题 要实现3对1通信还是很让我头疼的, 但最终在网上搜集资料加以自己的理解,也最终实现了通讯, 主单片机使用的是STM32F103VET6+NRF24L01+OLED显示+舵机控制器 最终也完成了该项目的要求, 但是由于没有相应产品设计的帮忙最终是在仿制的人手上来采集的角度变换,由于机械臂的价格比较便宜所以带载能力不强 也只是实现了一个关节的仿真运动
能力标签
* 单片机程序开发
* 机械结构调试
* 控制算法
回忆
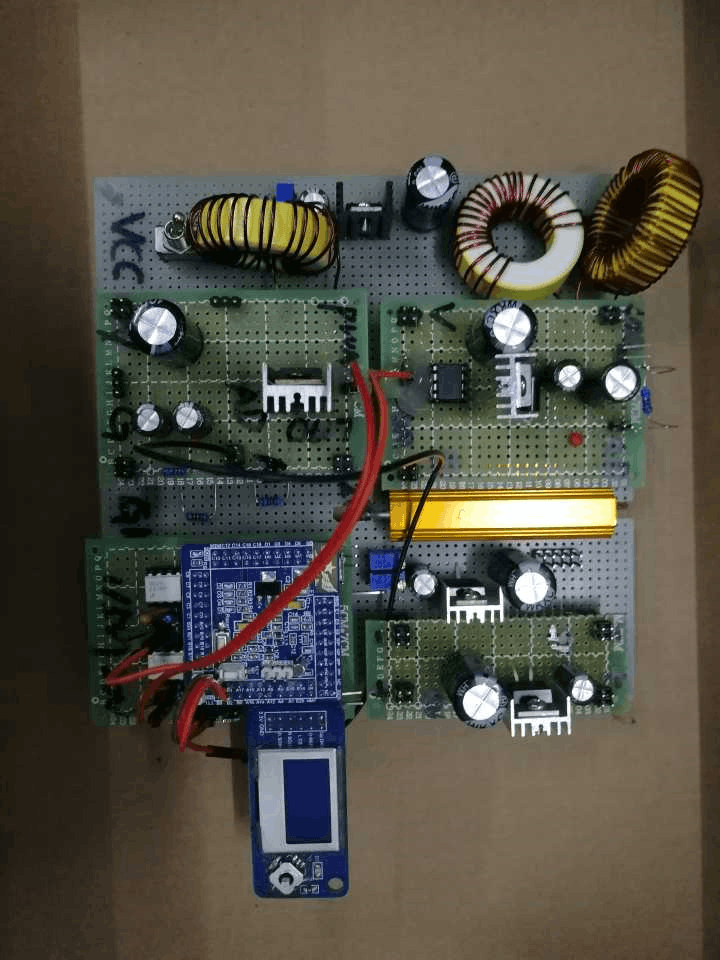
电子设计大赛校赛-电源题 校级二等奖 [2018.4]
这次的电赛可以说是很奇怪了, 题目控制题要求在去年基础之上再创新高, 控制题不允许是使用单片机,FPGA等可编程控制器, 逼于无奈,选择了几乎从来没做过的电源题, 利用BOOST和BUCK拓扑搭建硬件结构, 通过K60单片机片上AD采集输出电压, 利用片上定时器来输出PWM控制MOS管开通和关断来完成的题目, 我主要负责了硬件的搭建,和指导学弟程序编写。 由于接触次数比较少最终有一个问没达到指标。但是这个过程还是收获很大的。
能力标签
* 程控电源
* 单片机程序开发
* 控制算法
回忆
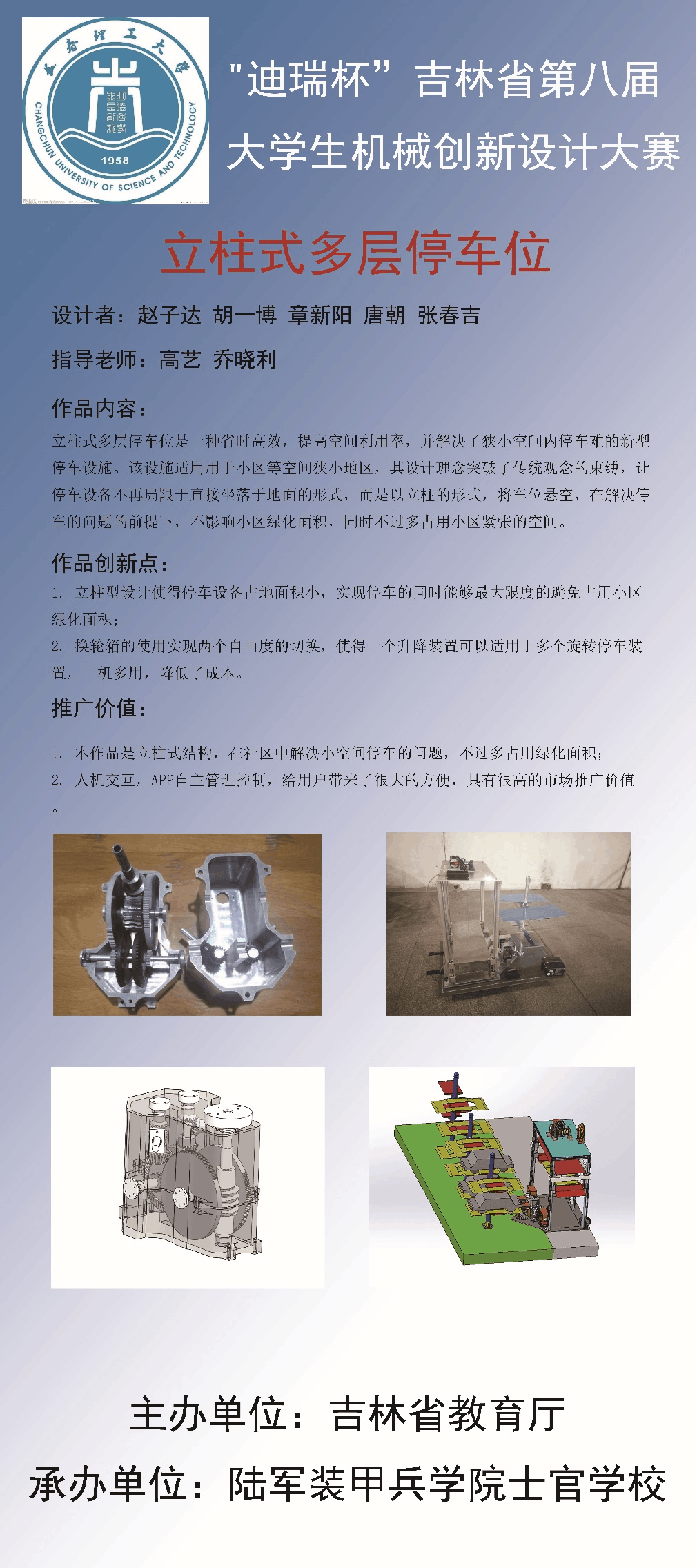
吉林省大学生机械创新大赛(立柱式停车位)校级一等奖 省级一等奖 [2017.12 + 2018.8]
这个比赛整体来讲可能是自己做的最少的比赛了, 打一开始就是被迫无奈充当一个学长带领四个学弟去做比赛, 总的来讲经历这个比赛前期大部分都是几个学弟在搞, 在后期我主要负责的是帮助他们接线, 提供电机驱动方法和一些控制传感器的选择, 帮助他们引出电源线,设计供电方案。 经历之后其实深深的感受到了机电一体化的含义, 有些时候电真的起着很重要的作用, 虽然大部分可以靠着机械来实现运动, 但是有了电的辅助就好像更加如虎添翼了一样, 比赛之余更多的是看到了学弟的努力, 有些像曾经的自己不断努力却始终没有收获, 那种心情真的是不想再有了, 也不想自己的学弟在经历那种感受, 结果还不错,你要加油哈学弟,未来的自己,也要加油!
能力标签
* 机械结构调试
* 单片机程序开发
* 控制算法
回忆
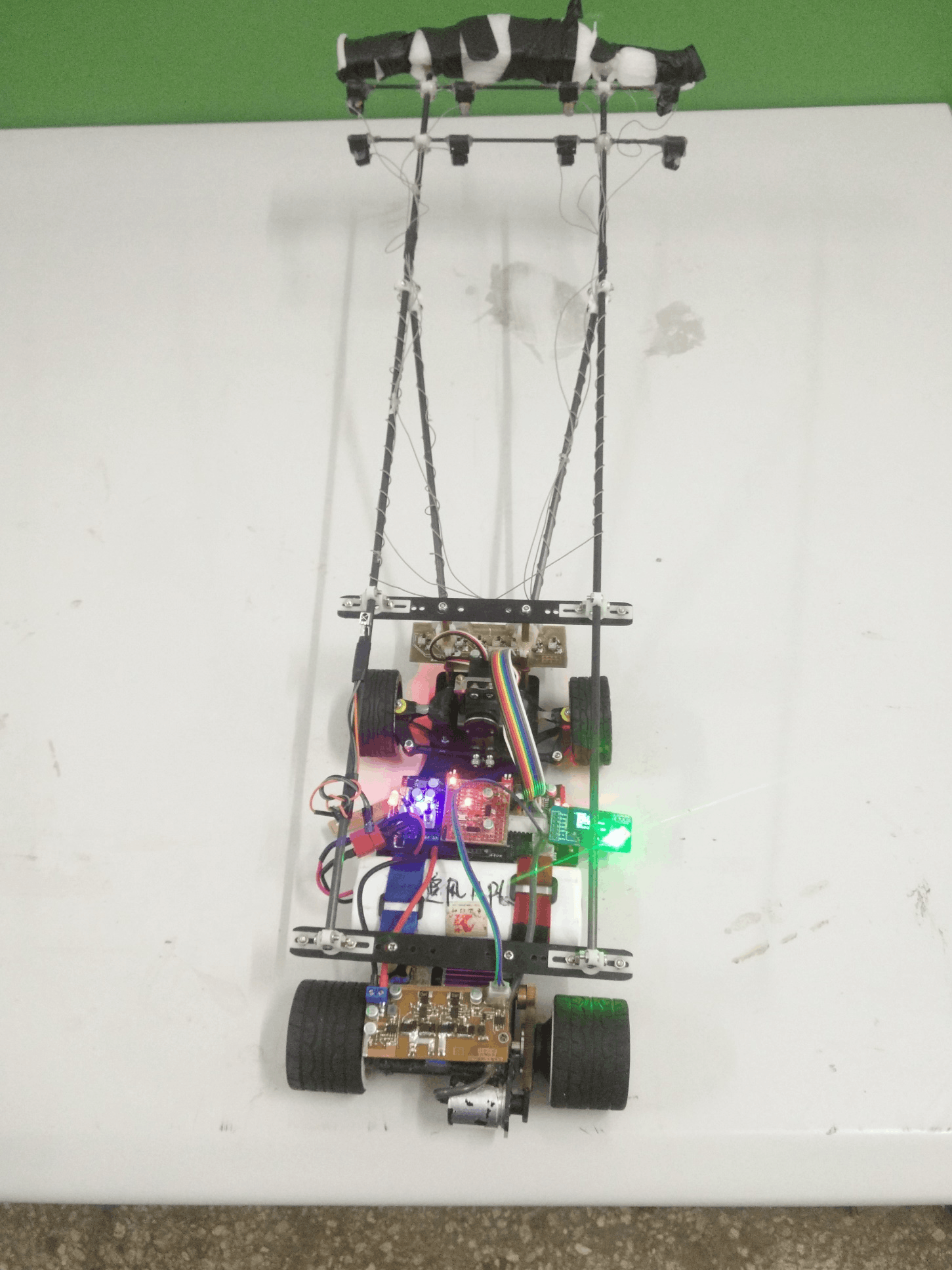
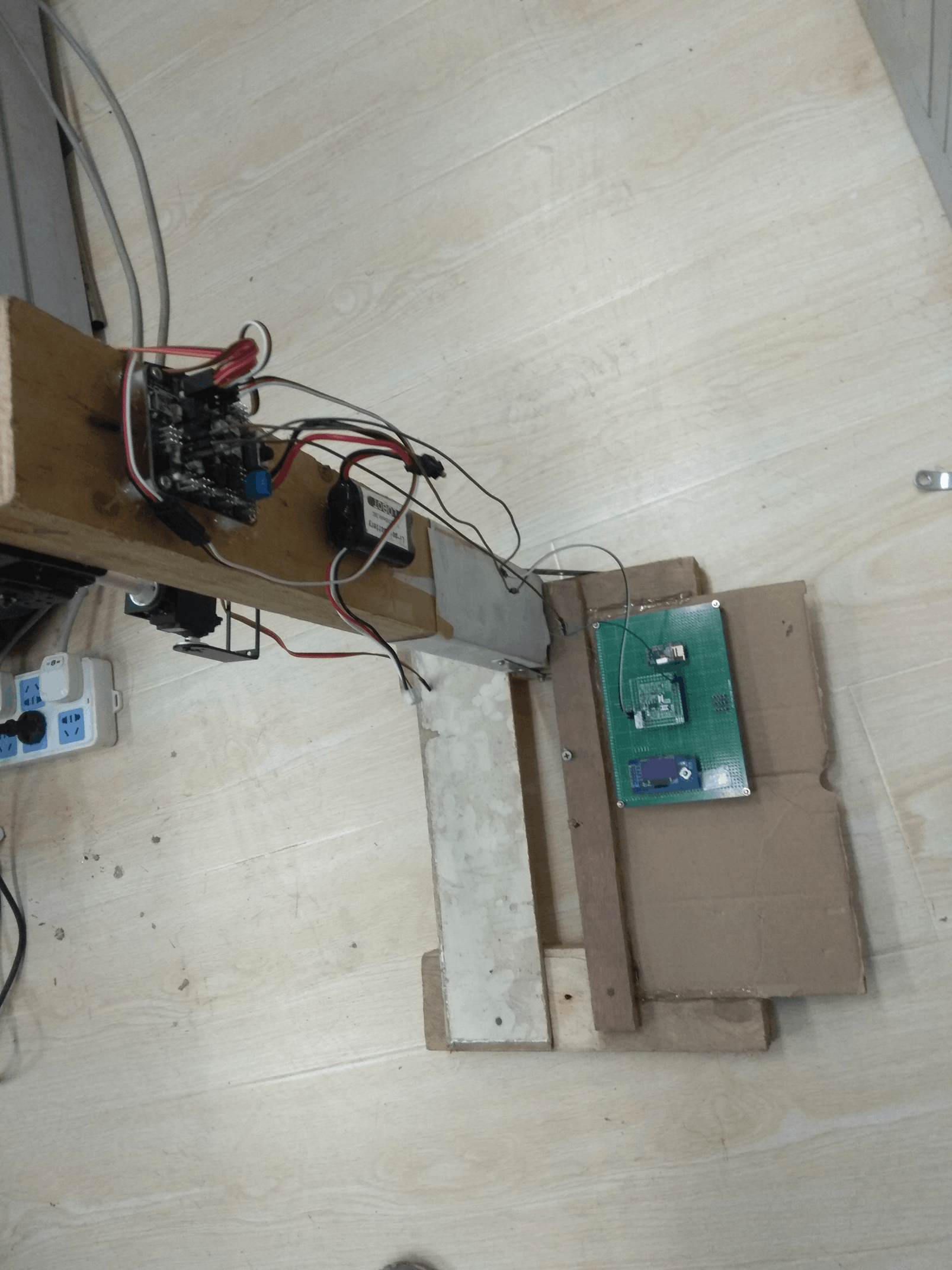
吉林省电子设计大赛控制题(电机悬吊系统)省级二等奖 [2018.8]
比赛主要是通过控制电机控制悬吊的激光头在下方表盘中实现各种路径的行动, 这是我在实验室的最后一次比赛了, 也是跟学弟的最后一次参赛, 身为学长说来可惜本应该多多动手帮忙, 但是最后并没有选择这样做更多是提供给学弟建议和去参考同届其他组的情况汇总与学弟商讨,不过看到学弟独当一面的那一刻其实还挺感动的,祝以后万事顺遂~
能力标签
* 控制算法
回忆

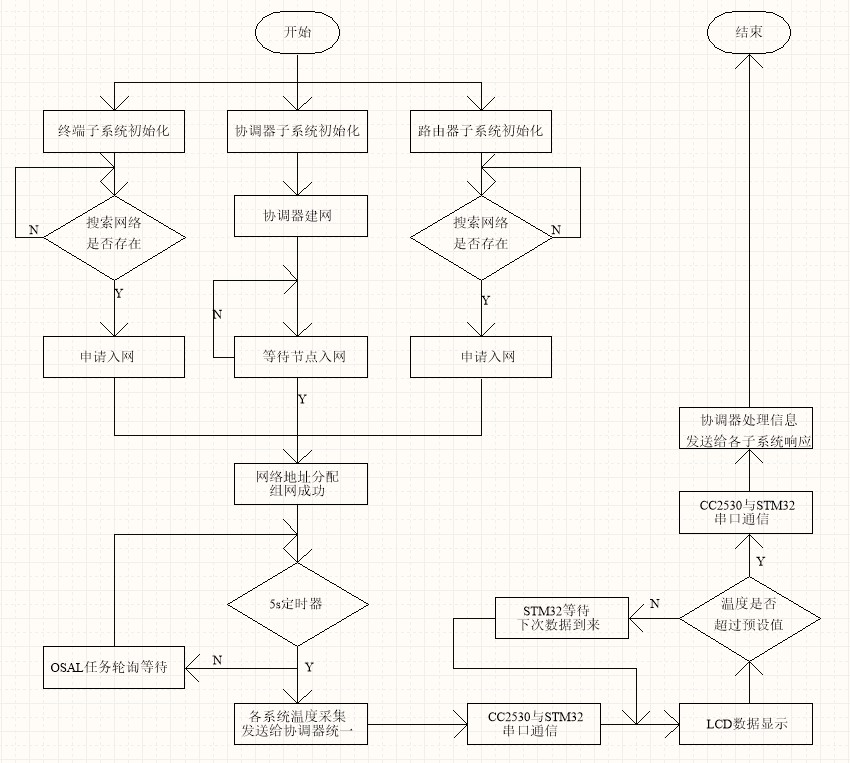
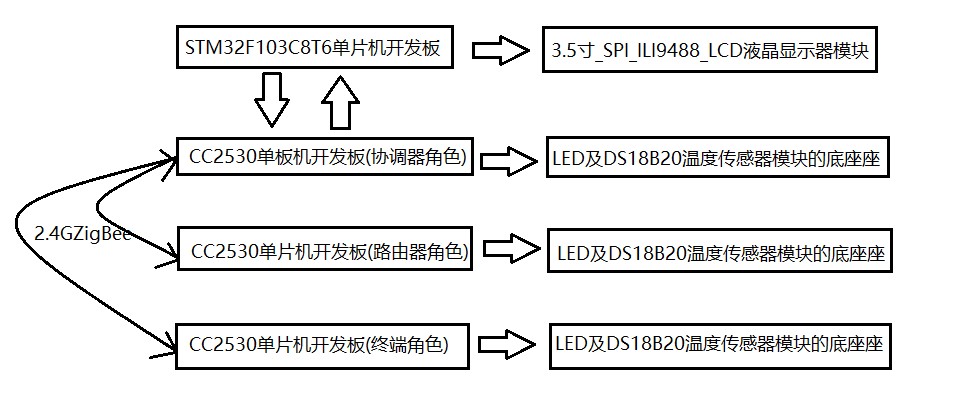
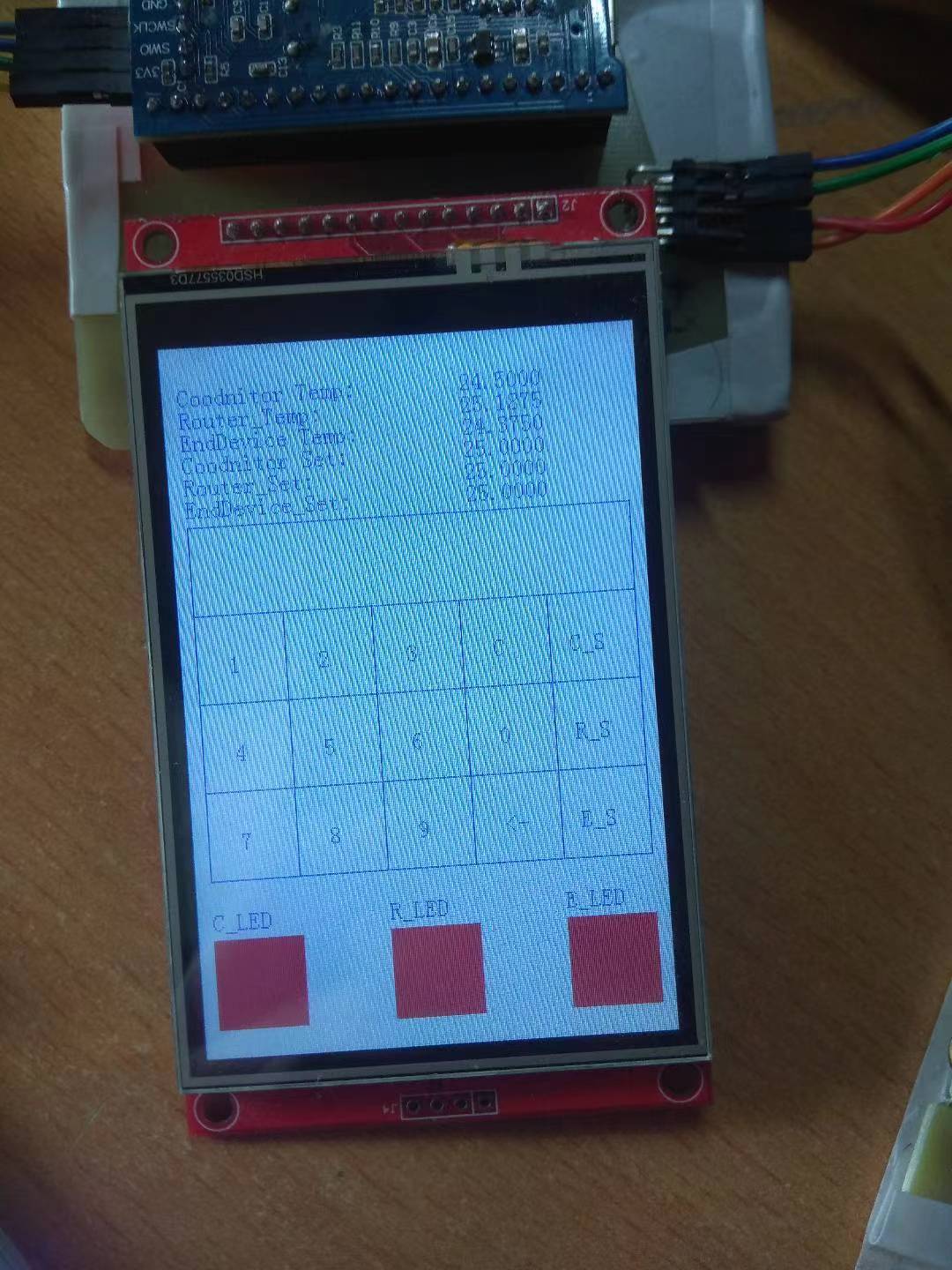
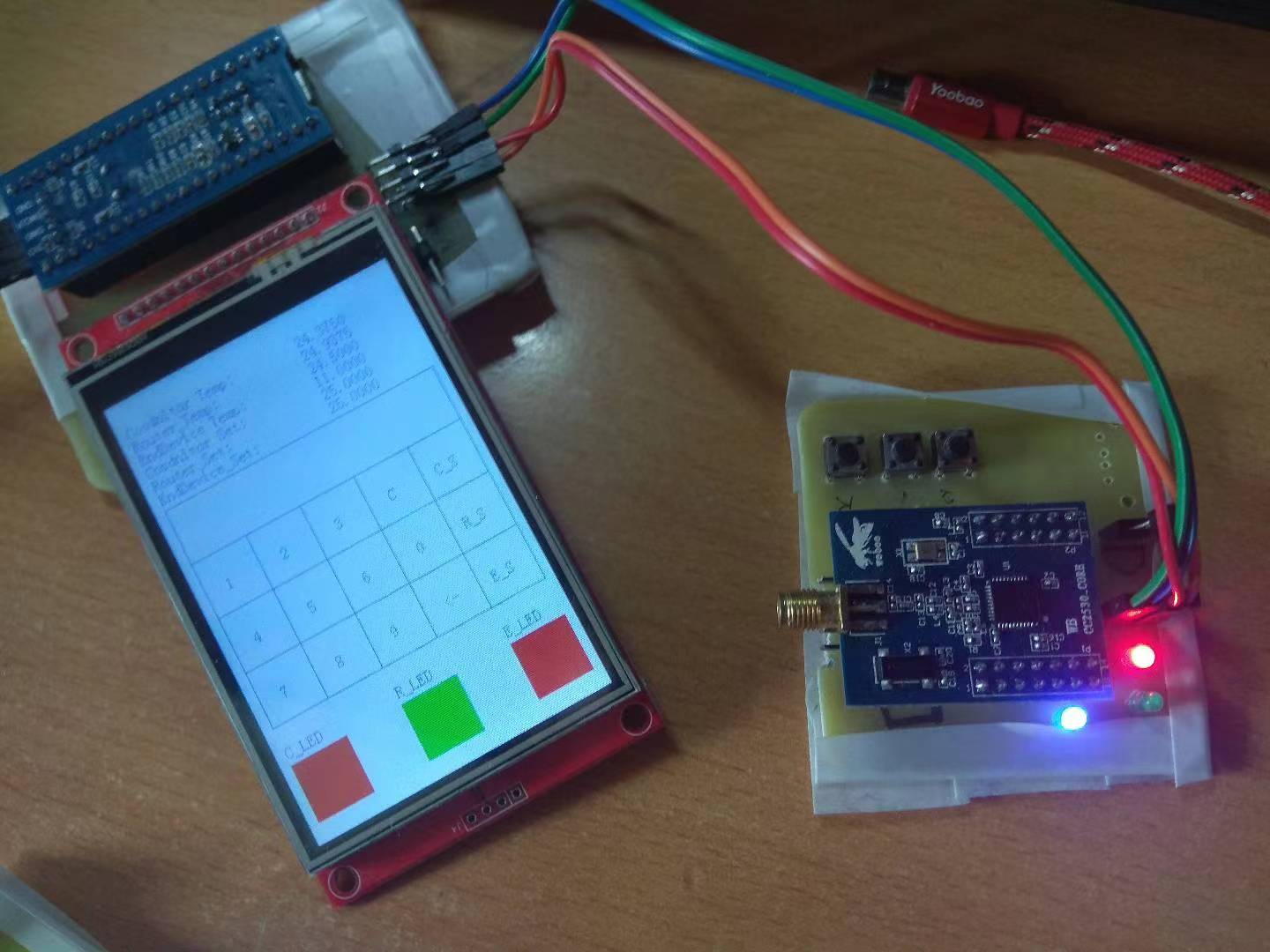
毕业设计基于ZigBee的温度测量系统研究 [2018.9-2019.5]
毕业设计主要基于CC2530的ZigBee协议栈实现三种角色进行DS18B20温度数据采集并且汇总到STM32F103C8T6单片机上进行显示,同时通过电阻触摸屏可以向个个子模块发送期望数据进行对应操作(点亮或熄灭LED)
能力标签
* 单片机程序开发
回忆

计算机二级 + 英语四级考试